
自定义泊车功能介绍


智驾小助手
07-14 18:24 · 小鹏汽车智能驾驶官方账号
鹏友们!
想象一下,你在周末奔赴热闹集市,街边停车位没画停车线,车辆停放杂乱无章。你驾车转了好几圈,发现一个空位,可位置刁钻,旁边车还歪着停,传统倒车入库根本行不通。这时的你是不是十分发愁?
不用着急,自定义泊车功能 “闪亮登场”。简单几步操作,你的爱车技能精准识别周边环境,稳稳泊入这个不规则车位,轻松化解停车尴尬。
今天,小助手就带你解锁自定义泊车的神奇用法。
开启功能
在中控屏“设置→辅助驾驶→泊车场景”界面,开启「超级智能辅助泊车」。

激活功能
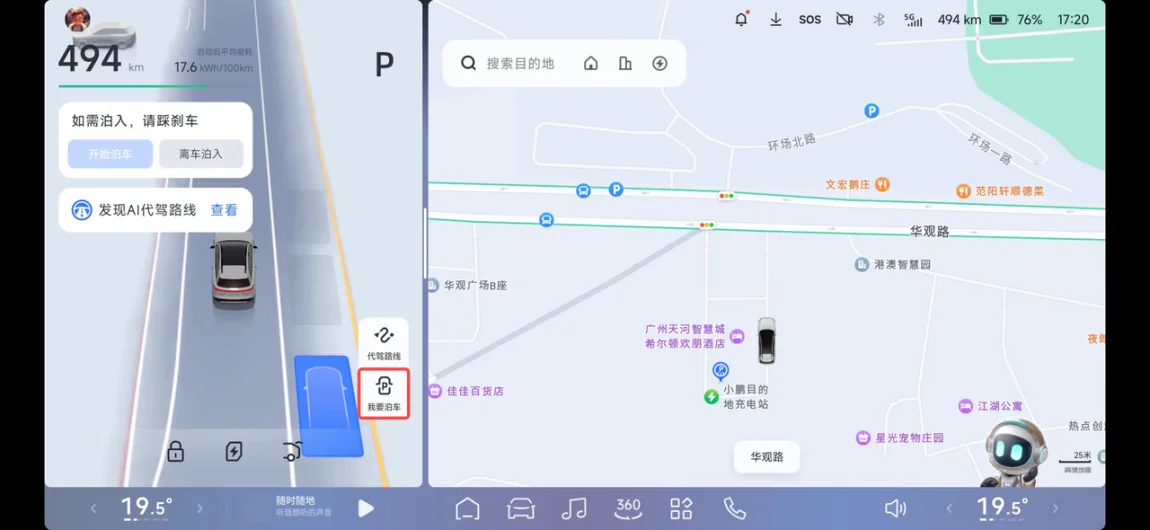
开至无线框停车位附近,点击「全域智驾」—「我要泊车」—「自定义泊车」

创建车位
创建方式:点击大屏360全景影像任意位置作为起点,绘制一条线,抬起手指后生成车位框。
车位生成:以绘制起点为车位生成起点,绘制方向为生成车位的车尾方向,绘制直线长度大于车位长边时抬起手指则符合生成车位的要求。绘制直线支持未抬起手指前,手指拖动来改变终点位置。出现蓝色停车框后表示车位已成功创建。
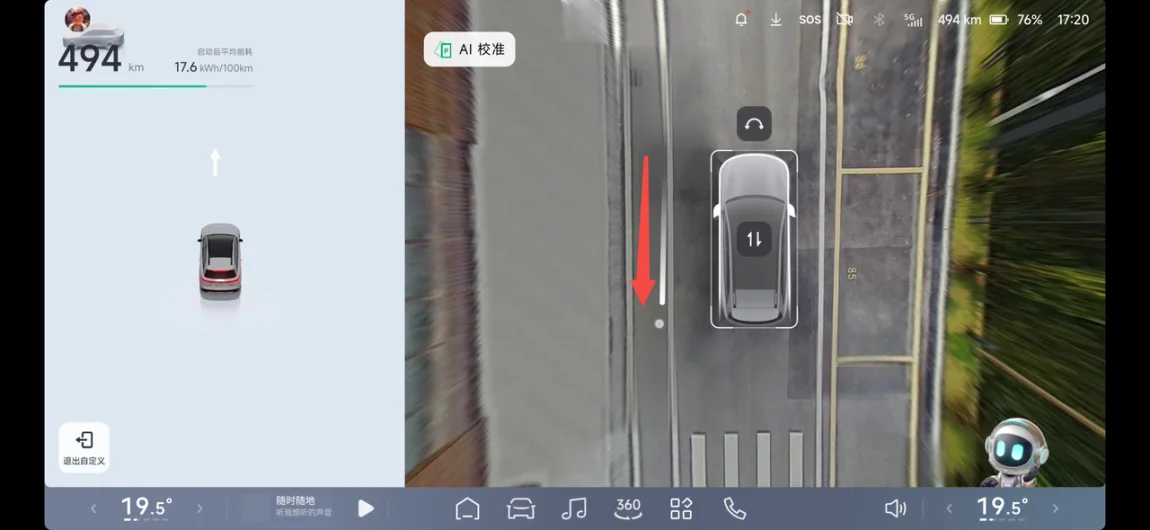
*泊入方向判断:绘制起点位置为车头
开始泊车
确认泊车位置后,踩住刹车,点击全域智驾界面「开始泊车」
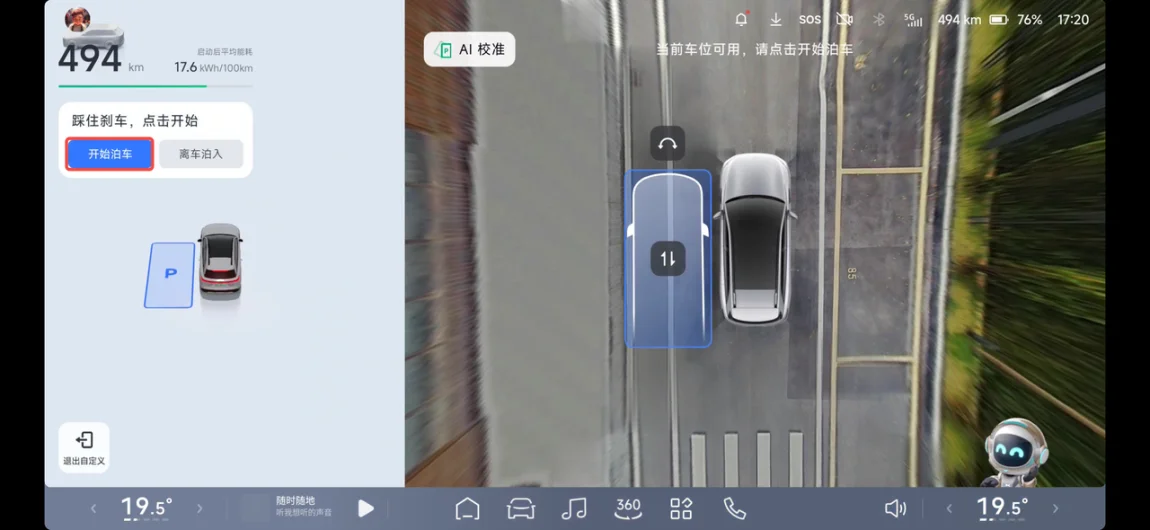
松开刹车,开始泊车
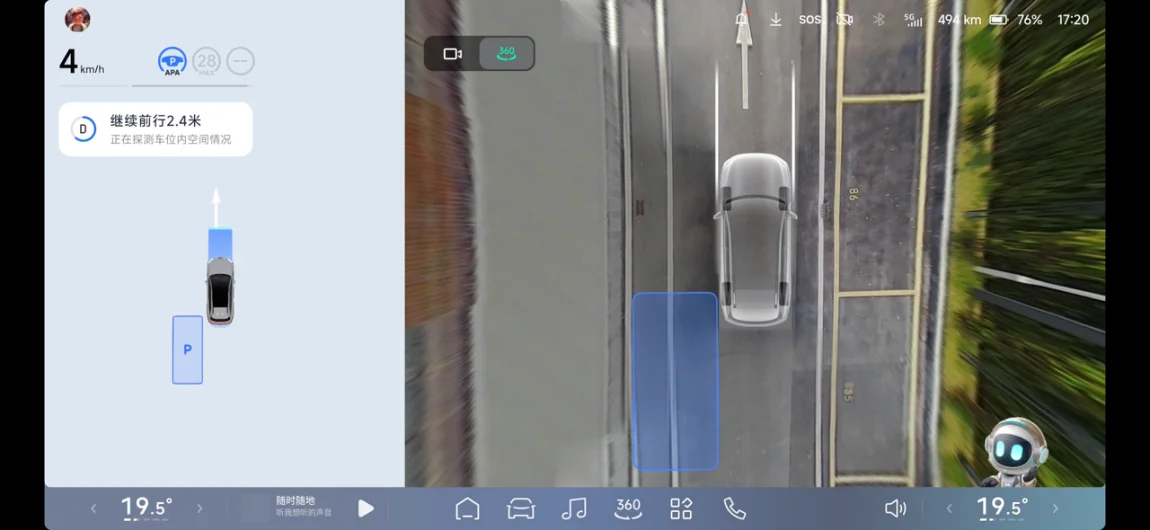
泊车完成
暂停与退出
暂停:踩下刹车
退出:按下P档按钮、转动方向盘
注意事项
🅿️ 泊车全程看中控 / 环视,防车位边界误判。
🚪 离车泊入前,关门查后排有无儿童 / 物品。
❌ 禁用场景:
传感器 / 摄像头污损受阻
恶劣天气、路面不良(坑洼 / 结冰 / 湿滑)
路缘非石质 / 不可探测、有高度差路面
玻璃墙、昏暗 / 无照明环境
👀 需接管情况:
后视镜高度及以上障碍物
悬空、小体积 / 窄障碍物
盲区目标、行人 / 动物
最新评论 暂无评论
暂无评论

