纯视觉的智能驾驶,是高等级智能驾驶的必由之路

鹏友-亮哥
03-14 14:41
纯视觉的智能驾驶,是丢掉拐杖,简化路径的第一性原理,是高等级智能驾驶的必由之路。
基于机器视觉技术发展历程,我做一点简单分析:
其演进可分为以下三个阶段
第一阶段:手写数字识别——感知算法的启蒙时代
使用传统机器学习方法(如支持向量机、决策树),识别手写阿拉伯数字。这一阶段受限于算法复杂度和数据规模,模型仅能处理简单、结构化的二维图像(如手写阿拉伯数字),且依赖人工特征提取(如边缘检测、形状分析),缺乏对复杂模式的泛化能力。
第二阶段:静态图像识别——深度学习与数据驱动的飞跃
卷积神经网络(CNN)的引入,使机器能自动提取多层次特征+海量标注数据驱动模型泛化能力+GPU的普及加速了训练过程。
通过大规模数据集与深度神经网络(如AlexNet)的结合,机器在2012年首次实现高精度物体识别,正确率超过人类水平。
第三阶段:动态视频识别——空间智能与行动智能的融合
动态视频识别的核心挑战在于时空一致性与物理规律建模。机器人通过视觉输入预测物体运动(如判断杯子是否会被猫推倒,并主动干预)
利用Transformer架构构建大型世界模型,整合多模态数据(RGB-D、LiDAR);
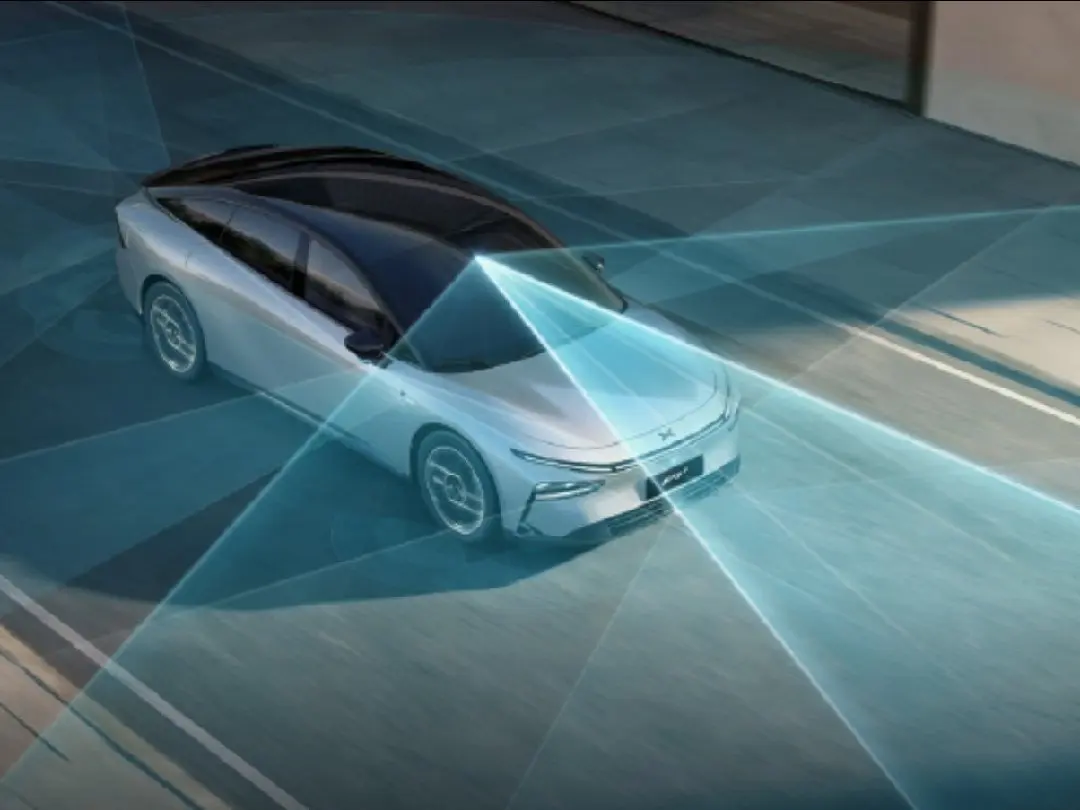
目前机器视觉正在步入第三个阶段,所以特斯拉按照第一性原理做了纯视觉智驾,这个引领者是毫无问题的,小鹏跟随,肯定也是判断机器视觉即将迎来突破。
车厂引入纯视觉,不只是减少几个雷达传感器,降低成本,而是降低了整个智驾硬件的复杂度。
纯视觉智驾,只需要摄像头拍摄到,人工智能识别动态图像即可,也就是智驾只需要摄像头+芯片。
以上是昨天小鹏新款G6/G9上市后,我的一点遐想,请大家批评指正。
最新评论 暂无评论
暂无评论

