
关于自动泊车你肯定听得多了,而小鹏G3的全场景自动泊车你想了解吗?今天我们就一起来看看小鹏G3的全场景自动泊车到底是怎么实现的。

小鹏汽车自动泊车功能实际上属于特定场景下的自动化驾驶技术,系统通过替代驾驶员控制车辆运动,实现车辆的完全自动泊入车位,自动泊车过程精准可靠,能够实现的场景包括平行泊车、垂直泊车、斜线车位泊车。

自动泊车的实现大致分为6个步骤,分别是构建环境、搜索车位、算法实现路径规划、启动自动泊车功能、车辆泊入、泊入完成。
小鹏G3找寻车位主要依赖自己的“眼睛”与“耳朵”。其“眼睛”是分布在车上四个方向的视觉传感器,简单描述说就是我们日常说的摄像头。“耳朵”则是环形布置在车身上的超声波雷达,其能够实时通过收发声波实现对车身周围场景的探测、测距、场景构建等。

当小鹏G3进入停车场或者相关泊车区域附近,视觉传感器和超声波雷达耦合的车位寻找技术会被激活,车辆在搜寻和评估车位时更加精准。
针对无车道线及无泊车车位线的其他场景车位,超声波雷达会对车位周围的车辆或障碍物进行感知和测距,形成虚拟的“现实场景”,然后快速的找寻车位和精准标定好车位,进行自动泊车。

而基于视觉摄像头的机器视觉技术,能在有车道线及有泊车车位线特征时,通过处理图像特征以及距离标定等相关算法,精准的识别和重现车位特征,进一步与声波信息进行融合,从而实现精准的车位找寻和标定,为后续的自动泊车的算法规划路径提供准确依据。

小鹏汽车自主开发自动泊车的全部算法,并且通过大量的实验和多路况场景测试,实现算法的快速迭代和不断升级,优化泊车路径实现最快速和精准的自动泊车。

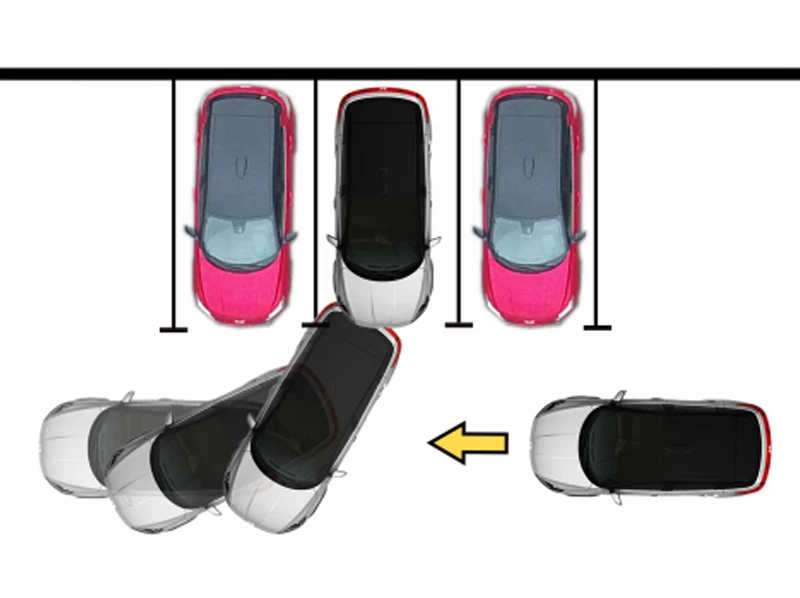
小鹏G3在通过大屏或者钥匙启动自动泊车功能后,车辆会根据智能控制器规划的最优路径开始车辆的泊入,车辆泊入的过程中,摄像头与超声波雷达会实时感知周围环境,一旦出现影响车辆正常泊入的障碍物、车辆、电动车或者行人时,会主动进行避障,及时刹车。当障碍物移动至非干扰区域时,自动泊车会再次启动,同时算法会对减速过程中的位移进行补偿和路径从新优化,再次精准的完成后续泊入,驾驶者也可以主动终止小鹏G3自动泊车功能。

小鹏G3在自动泊车过程中,无需驾驶员附加辅助驾驶操作。转向、制动等操作均可以由车辆自主完成,同时用户进行自动泊车的全过程的各项技术数据都会被系统记录和学习,作为功能迭代升级的重要参考。因此小鹏G3的自动泊车过程将会是一个不断在进行迭代升级的自我学习过程。随着用户使用场景的不断丰富,对泊车数据的深度挖掘和学习,使得小鹏G3的自动泊车功能成为一个不断自我更想新和自我完善的功能,使得每一次自动泊车都将会是更好的自动泊车。

