




4月14日,新出行发布了小鹏P7的自动泊车前向摄像头画面视频,整个视频时间39秒,展示了小鹏P7在地下车库的泊车感知能力。大包子狸做个简单的一分钟看完全文的文字干货归集如下:
1.超大车位识别位置
2.轨迹跟踪能力
3.车库绘图能力
4.极限车位识别能力
5.缺乏光照车位识别到位
6.地下车库无网络情况工作能力
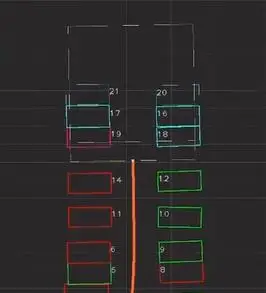
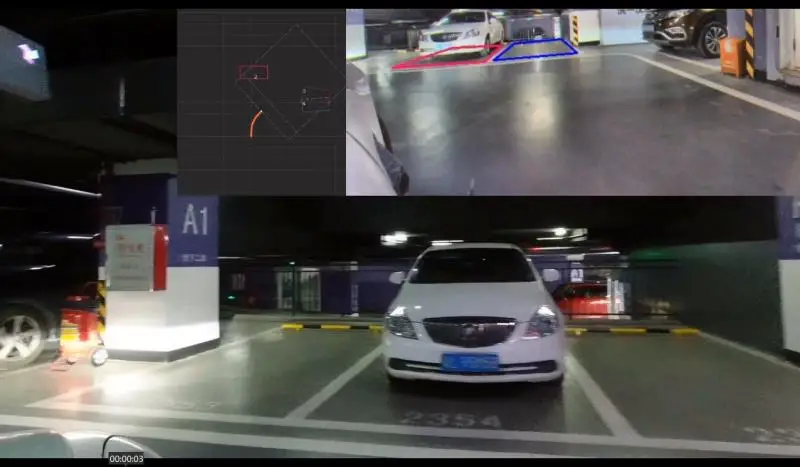
下面来做点简单的分析,首先是超大位置识别,按照图中的电脑模拟画面中,可以看到P7的自动泊车感知能力范围较大,而且改变了G3需要开过车位,车辆才能感知到车位。优化到可以自动捕捉前向车位,方便车辆自动做出决策。而且前向范围超过三个正常标准车位位置。

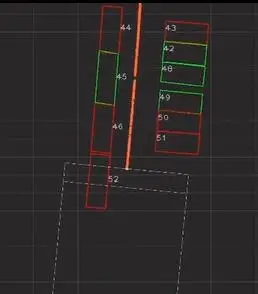
第二点是轨迹跟踪能力。看到在电脑模拟画面中,一条橙色的轨迹路线自动标注了车辆行驶的轨迹,这条轨迹记录能力,有助于P7记录下在这个车库的行驶路线。在以后触发在这个环境下的自动代客泊车中,按照这个轨迹行驶。也可以在用户触发召唤车辆时候,按照这个轨迹返回用户下车位置。甚至在自动代客泊车遇到障碍时,顺利返回原位。
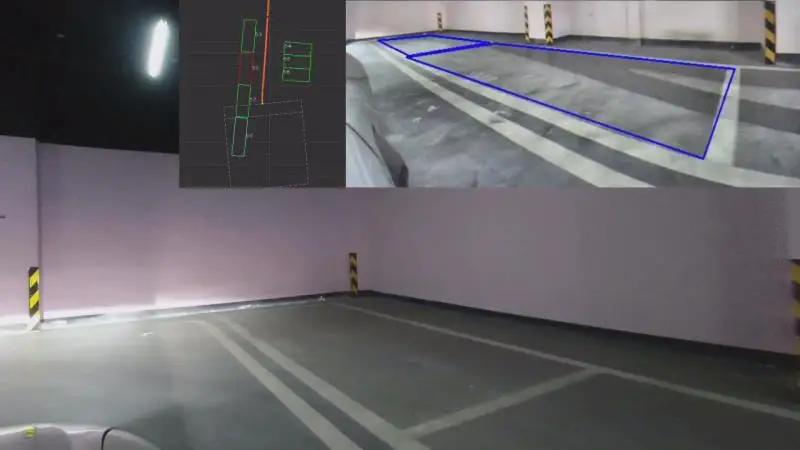
第三点是车库绘图能力。从电脑模拟画面和现实车载画面中可以看出,电脑模拟图基本上还原了该车库的地图位置,P7将会结合高精地图和大数据技术,对这个地点的停车场进行绘图管理,当车主驶入车库时候,P7将自动调出原有绘图,提高泊车准确性。
第四点是极限车位识别能力。在图中可以看到右上车位是一个死角车位,该车位的识别按照以往驶过才可以识别的能力判断,这个死角车位就无法识别了,也就更不能自动泊入了。但是在上图的电脑模拟图中,该车位被完美识别,且电脑模拟图上显示绿色,疑系统判断为可以自动泊入。

第五点是缺乏光照车位可识别。在部分灯光照明不够的车位,P7依然能够完整识别所有车位,体现了P7强有力的感知能力。也是针对中国国情地下车库较多的特色开发的特色功能。
第六点就是地下车库无网络工作能力。从视频中来看,P7采取弱网络依赖的泊车工作策略,在地下车库内这种网络信号覆盖较差的地点,车辆基本上依靠自身的摄像头和其余感知设备进行视觉融合感知,避免了网络信号依赖,增加设备的可靠性。


