

当今,自动驾驶技术已经成为整个汽车产业的最新发展方向。很快,从 2020 年开始,过去积累的自动驾驶技术科研成果及工程进步都将成为现实。自动驾驶汽车即将进入 10-20 年混合模式的时代。而其中的 LCC (车道居中辅助系统)作为 L2-L3 级智能辅助驾驶的核心技术,也是我们日常驾驶使用频率非常高的一项 ADAS 功能。
目前的智能辅助驾驶发展难在感知,而想要做好 LCC 的难点之一同样在于车辆对车道线的感知,尤其是在我国道路环境极其复杂的情况下。近日,业内公认的先行者小鹏汽车,其产品经理@黄鑫在社交平台公布了小鹏 P7 XPilot 3.0 的最新测试视频。那么问题来了,作为主攻视觉传感路线的小鹏,在识别车道线的能力上有着怎样的最新表现呢?我们通过下面这段非常有意思的视频一睹为快。(请猛戳下图↓↓↓↓↓)

小鹏智能辅助驾驶产品经理黄鑫
看完视频可以发现,小鹏 P7 所搭载的 XPilot 3.0 在识别车道线上的能力比想象中的还要强悍,通过摄像头识别以及决策芯片实时演算,小鹏 P7 在视频中车道线非常复杂的路面上俨然可以化身为一个车技不错的司机,它会精准识别车道线与道路中的其他车辆,并且测距精准。
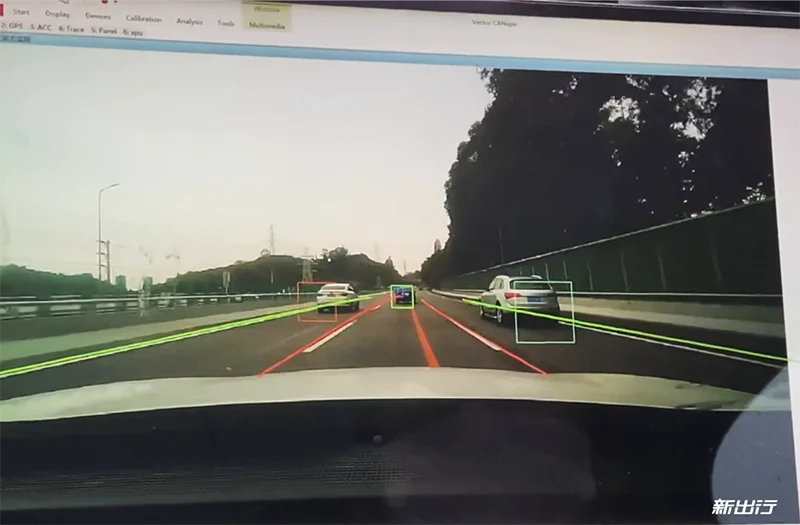
小鹏 P7 对车道中施工遗留下来的黄色标线进行识别并过滤
很明显,在面对视频中的高难度路况时,小鹏 P7 在工程车状态下已然取得了一个不错的成绩。视频里的 P7 在开启 LCC 状态下,系统做到了准确识别车道线,并且近乎完美地过滤掉了实际弃用的“黄色车道线”、“灰色车道线”,而在打转向灯自动变道的操作中,小鹏 P7 也排除干扰项并准确地完成了识别和执行。
@黄鑫表示:虽然这样的场景并不会干扰人类驾驶员,但单纯的计算机视觉却不能精确摆脱复杂的车道线干扰,所以类似场景也足以被称作「最危险的划线路段」。只有进行大量数据训练,通过深度学习让系统学会如何去分辨「正确的线」和「干扰的线」,才能提高智能辅助驾驶系统在干扰路面下的行驶安全性。
目前,越来越多的车企或者供应商正在推出自己的可量产的视觉方案,在识别车道线时,其中一部分“普通玩家”会通过边缘检测,感知车道线后进行一个基本判断,而当路面划线复杂(例如反复施工的路面)或出现干扰项时可能会诱发判断紊乱,而从视频中可以看出,小鹏 P7 在极其复杂的路面上开启 LCC 后依旧保持了正常行驶,说明其针对这一块做了专门的数据训练与深度学习,系统可以通过车道线的位置、颜色、浓度、距离等因素排除干扰,从而达到接近于人类驾驶员的程度。

而为了实现 XPilot 3.0,不得不提的就是小鹏 P7 搭载了全行业最强辅助驾驶硬件架构。
全车 12 个超声波传感器、5 个高精度毫米波雷达、13 个自动驾驶摄像头(包括前置 4 个摄像头,1 个三目摄像头模块和 1 个前置安全辅助摄像头,5 个增强感知摄像头,左右两侧各两个,后置一个,以及 4 个环视摄像头,共计 13 个)、1 个车内摄像头,实现了摄像头和雷达双重 360 度感知,同时匹配高精度地图和定位的支持,以及车内摄像头对驾驶员的监控,达到 L3 级自动驾驶的感知条件。

概括来说,小鹏 P7 搭载的 XPilot 3.0 的硬件配置非常夸张,不仅决策芯片业内领先,最重磅莫过于其笑傲江湖的 13 个用于智能辅助驾驶的摄像头。
通过今天的视频体验,验证了小鹏在智能辅助驾驶领域的技术水平,对于追求智能驾驶的消费者来说,XPilot 3.0 可谓吸引力满满。
综上所述,小鹏 P7,未来可期。(文章来源:新出行)

